NEW 물체 조작 손 동작 3D 데이터
- 분야영상이미지
- 유형 비디오 , 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2024-10-30 데이터 최종 개방 1.0 2024-09-06 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-09-06 산출물 공개 Beta Version 소개
- 일상생활에서 수행되는 다양한 손동작 움직임(물체와의 상호작용)의 추정 AI 학습을 위한 손동작 움직임 2D & 3D 데이터
구축목적
- 손-객체 사이의 상호작용을 이해하고 개별적인 자세 추정 문제를 해결하기 위해서는 이를 동시에 고려한 데이터 수집이 필수적임. 제한적인 손-물체 상호작용, 소규모의 객체 종류에 대해서만 수집된 기존 손-객체 상호작용 데이터의 한계점을 극복하는 대규모 손-물체 데이터셋을 구축하고자 함.
-
메타데이터 구조표 데이터 영역 영상이미지 데이터 유형 비디오 , 이미지 데이터 형식 jpg, png, txt 데이터 출처 키넥트 카메라 4대, 3D 모션캡쳐 시스템(적외선 8대 + 비디오 4대)으로 직접 촬영 라벨링 유형 키포인트(이미지) 라벨링 형식 json 데이터 활용 서비스 메타버스 내 사용자 컨트롤 인식 데이터 구축년도/
데이터 구축량2023년/2,100,014 set (이미지 – 2,100,014, json – 2,100,014, mocap object txt-13,652) -
- 데이터 통계
(1) 데이터 구축 규모
(1) 데이터 구축 규모 데이터명 원시데이터 수량 원천데이터 수량 라벨링 데이터 수량 물체 조작 손 동작
3D 데이터RGB-D
(MP4)50시간
70,000클립RGB
(JPG)2,100,000장 라벨링
데이터
(JSON)2,100,000건 적외선
(AVI)50시간
70,000클립RGB-D
(PNG)2,100,000장 객체 스캔데이터
(OBJ)30종 모캡 오브젝트 포즈정보 (TXT) 13,652건 (2) 데이터 분포
성별 분포 : 남, 여 각각 50%
성별 분포 : 남, 여 각각 50% 클래스 수 구성비 (%) 남자 1,049,826 49.99 여자 1,050,188 50.01 합계 2,100,014 100 연령대별 분포 : 10대, 20~30대, 40~50대, 60대 이상
연령대별 분포 : 10대, 20~30대, 40~50대, 60대 이상 클래스 수 구성비 (%) 10대 529,573 25.22 20~30대 524,764 24.99 40~50대 518,460 24.69 60대 이상 527,187 25.1 합계 2,100,014 100 90종(30 object * 3 grasp) 물체/손동작 상호작용 분포
90종(30 object * 3 grasp) 물체/손동작 상호작용 분포 1차 분류 image Taxonomy[1] Taxonomy[2] Taxonomy[3] 1 cracker_box 
13: Precision Sphere

19: Distal Type

22: Parallel Extension

2 potted_meat_can 
1: Large Diameter

12: Precision Disk

19: Distal Type

3 banana 
3: Medium Wrap

4: Adducted Thumb

14: Tripod

4 apple 
11: Power Sphere

13: Precision Sphere

14: Tripod

5 wine_glass 
7: Prismatic 3 Finger

10: Power Disk

24: Tip Pinch

6 bowl 
12: Precision Disk

16: Lateral

30: Palmar

7 mug(disk, large/small
실린더)
5: Light Tool

12: Precision Disk

31: Ring

8 plate 
16: Lateral

18: Extension Type

30: Palmar

9 spoon 
5: Light Tool

20: Writing Tripod

29: Stick

10 knife 
5: Light Tool

17: Index Finger Extension
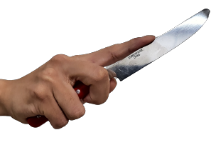
20: Writing Tripod

11 small marker 
5: Light Tool

7: Prismatic 3 Finger

9: Palmar Pinch

12 spatula 
4: Adducted Thumb

20: Writing Tripod

17: Index Finger Extension

13 flat_screwdriver 
2: Small Diameter

4: Adducted Thumb

14: Tripod

14 hammer 
2: Small Diameter

4: Adducted Thumb

17: Index Finger Extension

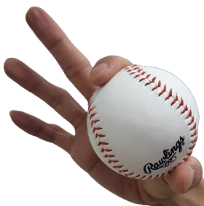
15 baseball 
11: Power Sphere

28: Sphere 3 Finger

33: Inferior Pincer
16 golfball 
14: Tripod

27: Quadpod

33: Inferior Pincer

17 credit card
(small disk)
16: Lateral
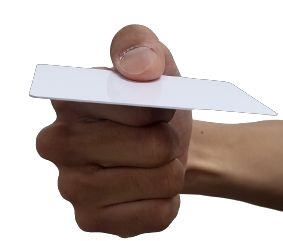
23: Adduction Grip

24: Tip Pinch

18 dice 
14: Tripod

9: Palmar Pinch

16: Lateral

19 disk lid
disk, sylinder
28: Sphere 3 Finger

10: Power Disk

18: Extension Type

20 smartphone 
12: Precision Disk

16: Lateral

22: Parallel Extension

21 mouse 
12: Precision Disk

19: Distal Type

26: Sphere 4-Finger

22 1/4 tape 
5: Light Tool

12: Precision Disk

25: Lateral Tripod

23 master_chef_can 
1: Large Diameter

12: Precision Disk

31: Ring

24 Scrub_cleanser_bottle 
1: Large Diameter

19: Distal Type

31: Ring

25 large_marker 
5: Light Tool

9: Palmar Pinch
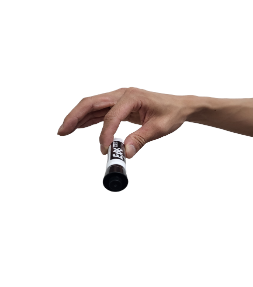
20: Writing Tripod

26 stapler 
4: Adducted Thumb

17: Index Finger Extension

33: Inferior Pincer

27 note 
16: Lateral

18: Extension Type
22: Parallel Extension

28 scissors 
16: Lateral

19: Distal Type

12: Precision Disk

29 foldable phone 
12: Precision Disk

16: Lateral

18: Extension Type

30 cardboard box 
18: Extension Type

28: Sphere 3 Finger

19: Distal Type

90종(30 object * 3 grasp) 물체/손동작 상호작용 분포 id class count 비율 비고 1 13 23458 1.12 cracker_box-13 1 19 23210 1.11 cracker_box-19 1 22 23334 1.11 cracker_box-22 2 1 23333 1.11 potted_meat_can-1 2 12 23334 1.11 potted_meat_can-12 2 19 23333 1.11 potted_meat_can-19 3 14 23334 1.11 banana-14 3 3 23333 1.11 banana-3 3 4 23334 1.11 banana-4 4 11 23334 1.11 apple-11 4 13 23333 1.11 apple-13 4 14 23333 1.11 apple-14 5 10 23334 1.11 wine_glass-10 5 24 23333 1.11 wine_glass-24 5 7 23334 1.11 wine_glass-7 6 12 23333 1.11 bowl-12 6 16 23333 1.11 bowl-16 6 30 23334 1.11 bowl-30 7 12 23334 1.11 mug-12 7 31 23333 1.11 mug-31 7 5 23334 1.11 mug-5 8 16 23334 1.11 plate-16 8 18 23313 1.11 plate-18 8 30 23334 1.11 plate-30 9 20 23333 1.11 spoon-20 9 29 23333 1.11 spoon-29 9 5 23334 1.11 spoon-5 10 17 23334 1.11 knife-17 10 20 23334 1.11 knife-20 10 5 23334 1.11 knife-5 11 5 23334 1.11 small marker-5 11 7 23334 1.11 small marker-7 11 9 23333 1.11 small marker-9 12 17 23333 1.11 spatula-17 12 20 23334 1.11 spatula-20 12 4 23333 1.11 spatula-4 13 14 23333 1.11 flat_screwdriver-14 13 2 23333 1.11 flat_screwdriver-2 13 4 23334 1.11 flat_screwdriver-4 14 17 23333 1.11 hammer-17 14 2 23334 1.11 hammer-2 14 4 23333 1.11 hammer-4 15 11 23334 1.11 baseball-11 15 28 23333 1.11 baseball-28 15 33 23333 1.11 baseball-33 16 14 23334 1.11 golfball-14 16 27 23334 1.11 golfball-27 16 33 23334 1.11 golfball-33 17 16 23333 1.11 credit card-16 17 23 23334 1.11 credit card-23 17 24 23334 1.11 credit card-24 18 14 23334 1.11 dice-14 18 16 23333 1.11 dice-16 18 9 23334 1.11 dice-9 19 10 23334 1.11 disk lid-10 19 18 23333 1.11 disk lid-18 19 28 23333 1.11 disk lid-28 20 12 23333 1.11 smartphone-12 20 16 23334 1.11 smartphone-16 20 22 23333 1.11 smartphone-22 21 12 23333 1.11 mouse-12 21 19 23333 1.11 mouse-19 21 26 23334 1.11 mouse-26 22 12 23333 1.11 1/4 tape-12 22 25 23334 1.11 1/4 tape-25 22 5 23334 1.11 1/4 tape-5 23 1 23333 1.11 master_chef_can-1 23 12 23333 1.11 master_chef_can-12 23 31 23347 1.11 master_chef_can-31 24 1 23334 1.11 Scrub_cleanser_bottle-1 24 19 23335 1.11 Scrub_cleanser_bottle-19 24 31 23334 1.11 Scrub_cleanser_bottle-31 25 20 23333 1.11 large_marker-20 25 5 23334 1.11 large_marker-5 25 9 23334 1.11 large_marker-9 26 17 23690 1.13 stapler-17 26 33 22977 1.09 stapler-33 26 4 23334 1.11 stapler-4 27 16 23334 1.11 note-16 27 18 23333 1.11 note-18 27 22 23334 1.11 note-22 28 12 23333 1.11 scissors-12 28 16 23333 1.11 scissors-16 28 19 23334 1.11 scissors-19 29 12 23334 1.11 foldable phone-12 29 16 23333 1.11 foldable phone-16 29 18 23333 1.11 foldable phone-18 30 18 23334 1.11 cardboard box-18 30 19 23333 1.11 cardboard box-19 30 28 23334 1.11 cardboard box-28 합계 2,100,014 100.00% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 활용 모델
활용 모델 HFL-Net 알고리즘 - Harmonious Feature Learning Network
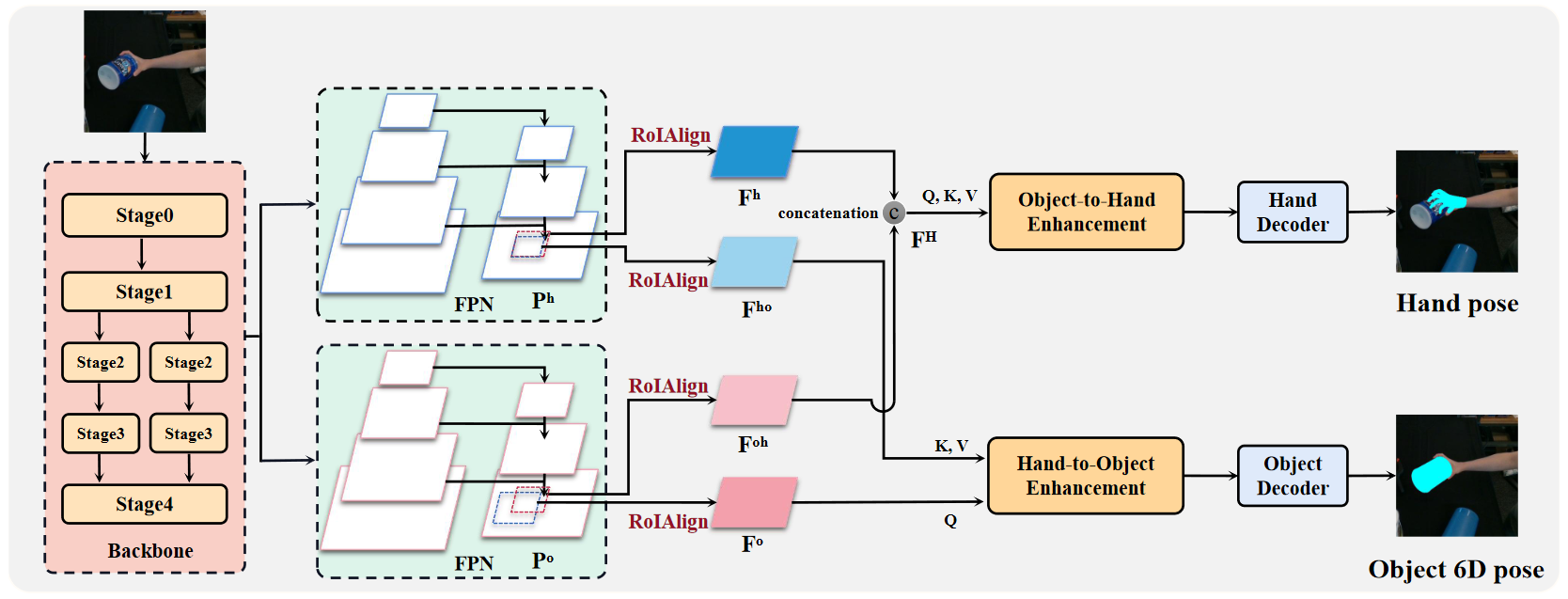
선정사유 - 저수준과 고수준 레이어의 매개변수로 손과 물체에 대해 서로의 정보를 공유하면서 손과 물체 두 대상간 상호 작용이나 의존성을 모델이 학습하도록 지원하면서 중간 레벨 레이어를 독립적으로 분리시킴으로써 각 대상에 대한 특징은 개별적으로 학습시켜 손과 물체 학습 시 발생하는 feature학습의 간섭, 경쟁 문제를 해결해 손과 물체의 상호작용에 중점을 둔 과제 방향성에 부합하다고 판단함.
선행연구 - ‘Harmonious Feature Learning for Interactive Hand-Object Pose Estimation’에서 2023년 Ho3D 데이터셋으로 예측된 조인트 위치와 지상 실측 조인트 위치 사이 평균 거리를 측정한 mean distance error(mm) 8.9를 기록
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 데이터 구성
데이터 구성 데이터명 원시데이터 포맷 원천데이터 포맷 라벨링 데이터 포맷 물체 조작
손 동작 3D
데이터- RGB-D 영상(MP4)
- 적외선(AVI)
- 객체 스캔 데이터(OBJ)- RGB 이미지(JPG)
- Depth 이미지(PNG)
- 모캡 오브젝트 포즈
정보(TXT)- 라벨링 데이터(JSON) - 어노테이션 포맷
○ 메타 정보메타 정보 구분 속성명 타입 필수여부 설명 범위 비고 1 info Object 데이터셋 정보 1-1 info.name String Y 데이터셋 이름 1-2 info.description String 상세설명 1-3 info.url String URL 1-4 info.date_created String Y 생성일자 2 actor Object 촬영자 정보 2-1 actor.id String Y 촬영자 ID 2-2 actor.sex String Y 촬영자 성별 [M/F] 2-3 actor.age String Y 촬영자 나이 2-4 actor.height Number Y 촬영자 신장 [140~190] [CM] 2-5 actor.handsize Number Y 촬영자 손 크기 [5~30] [CM] 3 kinect camera Object 키넥트 카메라 정보 3-1 kinect.name String Y 저장된 영상
이름3-2 kinect.time Number Y 기록시간 [ms] 3-3 kinect.id Number Y 키넥트 아이디 식별번호 3-4 kinect.height Number Y 영상 높이 [0~1080] 3-5 kinect.width Number Y 영상 너비 [0~1920] 4 infrared camera Object 적외선 카메라 정보 4-1 infrared[].name String Y 저장된 영상
이름4-2 infrared[].time String Y 기록 날짜 [YYYY-MM-DD] 4-3 infrared[].id Number Y 적외선 아이디 식별번호 4-4 infrared[].height Number Y 영상 높이 [0~1080] 4-5 infrared[].width Number Y 영상 너비 [0~1920] 4-6 infrared[].frame Number Y 프레임레이트 [30~60] 4-7 infrared[].resolution Number Y 해상도 [0.14~0.11] 4-8 infrared[].optics String Y 화각 [S.W.N] 5 images Object 이미지 정보 5-1 images.id String Y 식별자 5-2 images.width Number Y 이미지 너비 [0~1920] 5-3 images.height Number Y 이미지 높이 [0~1080] 5-4 images.file[]_name Array Y 파일명 [RGB, RGB-D] 5-5 images.date_created String Y 이미지 촬영일자 [YYYY-MM-DD hh:mm] 5-6 images.frame_num Number 프레임번호 [0~1000] 6 object Object 물체 정보 6-1 object.id String Y 물체 번호 6-2 object.name String Y 물체 이름 6-3 object.marker_count Number Y 물체 마커 개수 [0~10] 6-4 object.markers[]_data Array Y 물체 마커 값 [x,y,z] 6-5 object.pose[]_data Array Y 물체 포즈(6dof) 값 [x,y,z] 6-6 object.6D[]_pose_per_cam Array 각 카메라 기준 object 6D matrix 7 calibration Object 캘리브레이션 정보 7-1 calibration.error Number Y 오차율 [0.05~3.0] 픽셀 단위 7-2 calibration.extrinsic Array Y 키넥트 카메라 외부 파라미터 7-3 calibration.intrinsic Array Y 키넥트 카메라 내부 파라미터 8 hand Object 손 정보 8-3 hand.mano_scale Number MANO scale 값 8-4 hand.mano_xyz_root Array MANO xyz root 8-5 hand.3D_pose_per_cam Array 각 camera 기준 hand 3d pose 8-6 hand.projected_2D_pose_per_cam Array 각 camera 기준 projection된 hand 2D pose 9 contact[] Array contact 정보 값 ○ 라벨링 정보
라벨링 정보 구분 속성명 타입 필수여부 설명 범위 비고 1 annotations Object 어노테이션 정보 annotations[].id String Y 라벨링 식별자 annotations[].image_id String Y 연관 이미지 식별자 annotations[].class_id Number Y 클래스 식별자 [1~33] annotations[].class_name String Y 클래스명 annotations[].type String Y 라벨링 종류 [K] annotations[].data Array 라벨링 데이터 2 Mesh Object Mesh 정보 Mesh[].id String Y Mesh 식별자 Mesh[].image_id String Y 연관 이미지 식별자 Mesh[].class_id Number Y 클래스 식별자 [1~33] Mesh[].class_name String Y 클래스명 Mesh[].object_name String Y 메시 오프젝트 명 Mesh[].object_file String Y 메시 OBJ 파일 경로 Mesh[].object_mat Array Y 물체 동차좌표계 변환 값 Mesh[].mano_side String Y MANO 손 방향 구분 [L/R] Mesh[].mano_trans Array Y 손 메시 translation 값 Mesh[].mano_pose Array Y MANO pose 값 Mesh[].mano_betas Array Y MANO beta 값 - 데이터 포맷
(1) 원천데이터 포맷 예시원천데이터 포맷 예시 구분 예시 포맷 RGB
이미지
JPG 파일
(1920 x 1080)Depth
이미지
PNG 파일
(1920 x 1080)Mocap Object Pose
dataframe_info marker001 marker001 marker001 marker002 marker002 marker002 marker003 marker003 marker003 TXT 파일
(폴더 내
이미지 수
x 3marker
x xyz)x y z x y z x y z 2082 1.194 -8.927 17.089 -12.175 12.599 0.955 37.962 26.623 -2.145 2083 1.189 -8.924 17.088 -12.177 12.6 0.954 37.959 26.622 -2.15 2084 1.188 -8.926 17.09 -12.179 12.6 0.952 37.96 26.625 -2.148 2085 1.193 -8.928 17.093 -12.176 12.6 0.951 37.961 26.625 -2.138 2086 1.202 -8.93 17.105 -12.173 12.597 0.952 37.96 26.624 -2.135 2087 1.217 -8.928 17.125 -12.173 12.599 0.957 37.959 26.625 -2.145 2088 1.226 -8.926 17.136 -12.174 12.602 0.958 37.961 26.626 -2.154 ⋯⋯ (2) JSON 포맷 예시
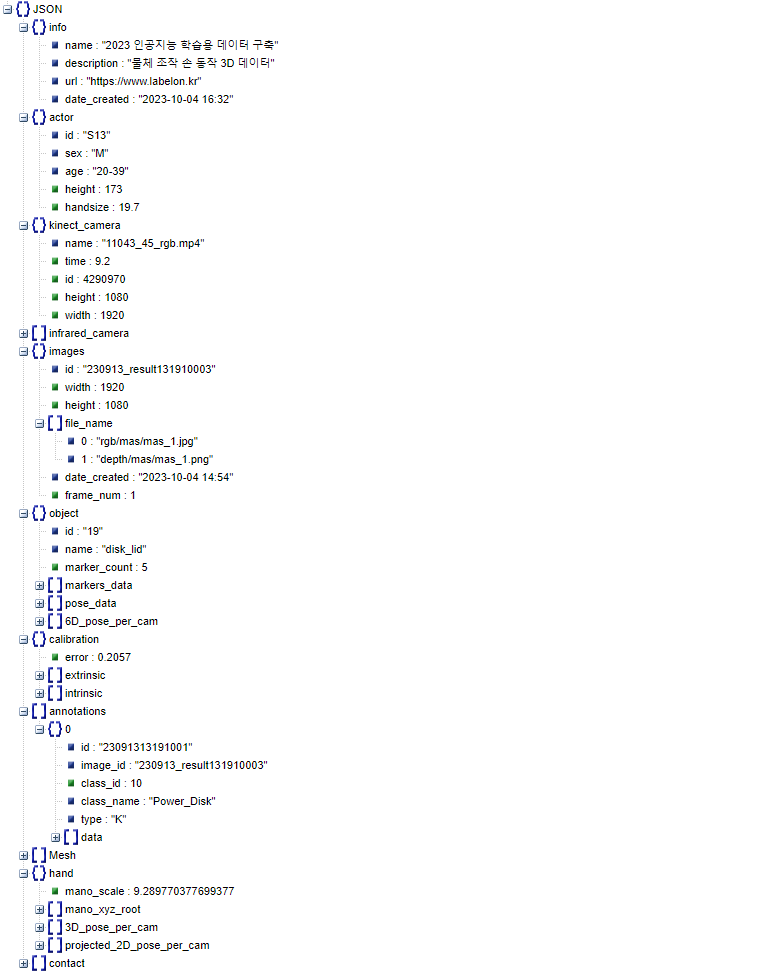
- 실제 예시실제 예시 구분 내용 라벨 {
"info": {
"name": "2023 인공지능 학습용 데이터 구축",
"description": "물체 조작 손 동작 3D 데이터",
"url": "https://www.labelon.kr",
"date_created": "2023-11-16 13:08"
},
"actor": {
"id": "59",
"sex": "M",
"age": "20-39",
"height": 174.0,
"handsize": 19.5
},
"kinect_camera": {
"name": "11043_45_rgb.mp4",
"time": 10.933333333333334,
"id": 4290970,
"height": 1080,
"width": 1920
},
"infrared_camera": [
{
"name": "11043_45_infrared.avi",
"time": "2023-11-10",
"id": 4290970,
"height": 1080,
"width": 1920,
"frame": 60,
"resolution": 0.14,
"optics": "S"
}
],
"images": {
"id": "230910_result091816006",
"width": 1920,
"height": 1080,
"file_name": [
"rgb\\mas\\mas_0.jpg",
"depth\\mas\\mas_0.png"
],
"date_created": "2023-09-12 12:41",
"frame_num": 0
},
"object": {
"id": "18",
"name": "dice",
"marker_count": 3,
"markers_data": [
[
32.088322999999995,
44.304058000000005,
69.997678
],
[
57.143343099999996,
-23.45357399999999,
69.515163
],
[
58.7988731,
-20.71435299999999,
0.6166201999999998
],
],
"pose_data": [
[
-0.8791570663452148,
0.011503252200782299,
0.47639361023902893,
57.82460403442383
],
[
-0.33998140692710876,
-0.7156447172164917,
-0.6101357936859131,
-3.5027458667755127
],
[
0.33390992879867554,
-0.6983700394630432,
0.6330746412277222,
803.8453369140625
],
[
0.0,
0.0,
0.0,
1.0
]
],
"6D_pose_per_cam": [
[
-0.8791570663452148,
0.011503252200782299,
0.47639361023902893,
5.7824602127075195
],
[
-0.33998140692710876,
-0.7156447172164917,
-0.6101357936859131,
-0.35027459263801575
],
[
0.33390992879867554,
-0.6983700394630432,
0.6330746412277222,
80.38453674316406
],
[
0.0,
0.0,
0.0,
1.0
]
]
},
"calibration": {
"error": 0.3434,
"extrinsic": [
[
1.0000000000000002,
-6.591949208711867e-17,
2.7755575615628914e-17,
1.7053025658242404e-14
],
[
3.8163916471489756e-17,
1.0,
0.0,
0.0
],
[
-2.7755575615628914e-17,
0.0,
1.0,
0.0
]
],
"intrinsic": [
[
942.911763192787,
0.0,
964.8910182109631
],
[
0.0,
931.7505875904958,
550.0068126653729
],
[
0.0,
0.0,
1.0
]
]
},
"annotations": [
{
"id": "23091516021200",
"image_id": "230915_result160212000",
"class_id": 12,
"class_name": "Precision_Disk",
"type": "K",
"data": [
[
[
-0.7671384811401367,
-9.914290428161621,
64.4963150024414
],
[
2.1700403690338135,
-10.775675773620605,
66.22233581542969
],
[
3.6716833114624023,
-10.69678020477295,
68.76618957519531
],
[
4.928519248962402,
-10.4520902633667,
71.02143859863281
],
[
7.081414222717285,
-8.955368041992188,
72.9849624633789
],
[
6.643858432769775,
-6.899735450744629,
67.0920639038086
],
[
8.939438819885254,
-4.73684549331665,
67.5546646118164
],
[
10.31890869140625,
-3.1806793212890625,
68.147216796875
],
[
11.995216369628906,
-1.6442451477050781,
68.52684020996094
],
[
5.731558322906494,
-4.861042499542236,
67.26077270507812
],
[
7.237117767333984,
-2.4421000480651855,
68.07762145996094
],
[
8.148430824279785,
-0.6158046722412109,
68.91746520996094
],
[
9.084446907043457,
1.0279502868652344,
70.50519561767578
],
[
3.4548678398132324,
-4.092462539672852,
67.43972778320312
],
[
4.455384254455566,
-1.9241228103637695,
68.6261978149414
],
[
4.941370487213135,
-0.1888713836669922,
70.18890380859375
],
[
4.456668853759766,
1.435770034790039,
71.82612609863281
],
[
1.6071791648864746,
-3.78240966796875,
67.83291625976562
],
[
1.7410578727722168,
-2.89570951461792,
69.58737182617188
],
[
1.5490894317626953,
-2.1618189811706543,
71.23834228515625
],
[
0.9279114007949829,
-1.3997020721435547,
72.93190002441406
]
]
]
}
],
"Mesh": [
{
"id": "23091009181602",
"image_id": "230910_result091816006",
"class_id": 16,
"class_name": "Lateral",
"object_name": "dice",
"object_file": "18_dice.obj",
"object_mat": [
[
-0.8791570663452148,
0.011503252200782299,
0.47639361023902893,
5.782460403442383
],
[
-0.33998140692710876,
-0.7156447172164917,
-0.6101357936859131,
-0.3502745866775513
],
[
0.33390992879867554,
-0.6983700394630432,
0.6330746412277222,
80.38453369140626
],
[
0.0,
0.0,
0.0,
1.0
]
],
"mano_side": "right",
"mano_trans": [
[
0.5502490997314453,
-2.9522228240966797,
2.2758231163024902
]
],
"mano_pose": [
[
0.1739771068096161,
-0.18168982863426208,
-0.03157597780227661,
-0.1325950026512146,
-0.024053100496530533,
-0.06060408055782318,
-0.0014389676507562399,
-0.056364625692367554,
-0.015108514577150345,
0.3381258547306061,
-0.20012687146663666,
0.08964131772518158,
-0.2270336151123047,
-0.08629845082759857,
-0.011799167841672897,
0.10245294868946075,
0.13613317906856537,
0.382275253534317,
-0.25420331954956055,
0.09584083408117294,
0.7951698899269104,
0.0023884489201009274,
-0.1719851940870285,
0.08427184820175171,
-0.25828325748443604,
-0.220594123005867,
0.1284627914428711,
-0.3836757242679596,
-0.2689516246318817,
0.06064837798476219,
-0.18135346472263336,
-0.12181350588798523,
-0.0035530307795852423,
-0.41774657368659973,
-0.3687087893486023,
0.0026129602920264006,
0.6399737596511841,
-0.4502032399177551,
0.5594432353973389,
-0.15101654827594757,
0.18338643014431,
-0.10601112246513367,
-0.553630530834198,
-0.28601720929145813,
-0.16836847364902496
]
],
"mano_betas": [
[
0.24246862530708313,
0.8262378573417664,
-2.542576551437378,
0.06515869498252869,
0.06016446650028229,
-0.9535319209098816,
-0.4865843951702118,
0.15838615596294403,
-0.1461678296327591,
0.4180024266242981
]
]
}
],
"hand": {
"mano_scale": 10.78937104903549,
"mano_xyz_root": [
-0.7671384811401367,
-9.914290428161621,
64.4963150024414
],
"3D_pose_per_cam": [
[
-0.7671384811401367,
-9.914290428161621,
64.4963150024414
],
[
2.1700403690338135,
-10.775675773620605,
66.22233581542969
],
[
3.6716833114624023,
-10.69678020477295,
68.76618957519531
],
[
4.928519248962402,
-10.4520902633667,
71.02143859863281
],
[
7.081414222717285,
-8.955368041992188,
72.9849624633789
],
[
6.643858432769775,
-6.899735450744629,
67.0920639038086
],
[
8.939438819885254,
-4.73684549331665,
67.5546646118164
],
[
10.31890869140625,
-3.1806793212890625,
68.147216796875
],
[
11.995216369628906,
-1.6442451477050781,
68.52684020996094
],
[
5.731558322906494,
-4.861042499542236,
67.26077270507812
],
[
7.237117767333984,
-2.4421000480651855,
68.07762145996094
],
[
8.148430824279785,
-0.6158046722412109,
68.91746520996094
],
[
9.084446907043457,
1.0279502868652344,
70.50519561767578
],
[
3.4548678398132324,
-4.092462539672852,
67.43972778320312
],
[
4.455384254455566,
-1.9241228103637695,
68.6261978149414
],
[
4.941370487213135,
-0.1888713836669922,
70.18890380859375
],
[
4.456668853759766,
1.435770034790039,
71.82612609863281
],
[
1.6071791648864746,
-3.78240966796875,
67.83291625976562
],
[
1.7410578727722168,
-2.89570951461792,
69.58737182617188
],
[
1.5490894317626953,
-2.1618189811706543,
71.23834228515625
],
[
0.9279114007949829,
-1.3997020721435547,
72.93190002441406
]
],
"projected_2D_pose_per_cam": [
[
953.6757202148438,
406.7793273925781
],
[
995.789306640625,
398.3927001953125
],
[
1015.2365112304688,
405.0703430175781
],
[
1030.3240966796875,
412.88287353515625
],
[
1056.3775634765625,
435.6795654296875
],
[
1058.2637939453125,
454.185791015625
],
[
1089.6654052734375,
484.6737060546875
],
[
1107.66748046875,
506.5185852050781
],
[
1129.9420166015625,
527.6502075195312
],
[
1045.240234375,
482.66778564453125
],
[
1065.12890625,
516.582763671875
],
[
1076.3758544921875,
541.6812744140625
],
[
1086.3831787109375,
563.591552734375
],
[
1013.1953125,
493.46514892578125
],
[
1026.1070556640625,
523.8826904296875
],
[
1031.27294921875,
547.4995727539062
],
[
1023.3967895507812,
568.632080078125
],
[
987.2315673828125,
498.0517883300781
],
[
988.4823608398438,
511.23431396484375
],
[
985.394775390625,
521.7316284179688
],
[
976.8876342773438,
532.124755859375
]
]
},
"contact": [
0.0,
(생략)
0.0
]
} -
데이터셋 구축 담당자
수행기관(주관) : ㈜써로마인드
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 최예성 02-872-5127 [email protected] 데이터 검증 AI 모델 학습 수행기관(참여)
수행기관(참여) 기관명 담당업무 벡터바이오 데이터 수집 및 정제 한국과학기술원 데이터 가공 및 구축 자문 유클리드소프트 데이터 검수 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 장하영 02-872-5127 [email protected] 최예성 02-872-5127 [email protected] AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 장하영 02-872-5127 [email protected] 최예성 02-872-5127 [email protected] 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 김승아 070-5165-6953 [email protected]
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 [email protected] 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.